Controlador económico y simple de motores paso a paso unipolares
En este artículo hemos intentado brindar al aficionado un circuito capaz de controlar un motor paso a paso que sea de muy simple y económica construcción. No posee la sofisticación y capacidades de los otros circuitos, que estarán disponibles en nuestro sitio, pero posee las características necesarias para cumplir con la mayoría de los proyectos. Utilizamos circuitos integrados no especializados en control de motores paso a paso que son comunes en el mercado, de manera de obtener un producto económico no dependiente de proveedores específicos. El costo final de esta placa en noviembre del 2006 es inferior a $12 (U$S 4).
por Groel Néstor, Pucheu Juan
Objetivos
Como remarcábamos en el resumen inicial, el objetivo de este circuito es cumplir con las necesidades básicas en algunos de los proyectos de este sitio, pero haciéndolo con un elemento económico, que sea de simple construcción y que no depende de la disponibilidad en el mercado de chips específicos para control de motores paso a paso.
Los circuitos electrónicos especializados poseen un mejor control del movimiento del motor y su consumo de corriente, pero son onerosos o difíciles de conseguir en muchos casos.
En esta versión no hemos utilizado microcontroladores para evitarle al aficionado lidiar con programadores especializados, pero en otras versiones más sofisticadas de este circuito lo haremos a cambio de obtener un mejor control del motor.
Las funciones requeridas al circuito son:
- Ajuste de la velocidad de giro del motor
- Ajuste del sentido de giro del motor
- Generación de la secuencia de señales necesaria para controlar un motor paso a paso
- Unidad de potencia que pueda administrar la corriente necesaria para mover el motor. En esta versión la unidad de potencia esta diseñada para un motor unipolar.
El circuito
Si observamos la Figura 1 podremos observar el diseño teórico del circuito. Hemos utilizado circuitos integrados de la familia CMOS CD4000 por poder adaptarse fácilmente a las dos condiciones de trabajo impuestas por nuestra unidad de potencia, así como garantizar su existencia en cualquier casa del ramo.
Para generar la secuencia de señales necesarias para controlar un motor paso a paso en el método de pulso completo y 2 fases, se ha elegido una variante de un popular circuito teórico de dominio público utilizado por más de tres décadas por aficionados a la robótica en todo el mundo. Lo conforman los circuitos CD4027 (U2) y CD4070 (U1). Para informarse acerca de su funcionamiento recomendamos revisar la bibliografía citada. Con el interruptor J1 se determina el sentido de giro del motor.
Para generar los pulsos necesarios para que estos dos circuitos integrados generen la secuencia necesaria para el motor paso a paso, se encuentra el CD4060(U5), que es un contador que actúa como base de tiempos ajustable por el aficionado. Este ajuste se realiza de dos maneras distintas. A través de la resistencia variable de 10kΩ, se acelera o retrasa la velocidad de conteo del reloj, mientras que con las distintas posiciones de J2 se determina el factor de división (en factores de 2). De esta manera, una vez fijado el rango de velocidades máximas y mínimas a través de J2, puede ajustarse con precisión el valor deseado de giro mediante la resistencia variable. Es necesario tener en cuenta que U5 no dispone de todas las salidas de sus contadores, faltan las primeras 3 divisiones y la salida 11.
Un parámetro que puede ser alterado en el circuito es C1 que puede tomar distintos valores en función del uso que se desee dar al circuito. Los autores recomendamos 100nf como un valor promedio razonable. En la Tabla 1 pueden encontrarse los valores teóricos estimados en vueltas del motor por día (el valor de C1 es 100nf) para varios valores de ángulo abarcado por cada paso. Debido a que no todos los motores avanzan el mismo ángulo por paso, hemos incluido los principales que son los que necesitan 200,100,48 y 15 pulsos para completar una vuelta. Los valores de la tabla no serán exactos en la práctica debido a las imprecisiones de los componentes electrónicos utilizados, pero aproximarán los rangos adecuados para que el aficionado preseleccione el área de trabajo. En el caso de utilizar esta placa en una bomba peristáltica, para convertir estos valores a un resultado útil al acuarista, es necesario conocer el volumen de líquido desplazado (por la bomba construida) en cada vuelta. En uno de los prototipos armados por los autores, la bomba desplazaba 0.5ml por vuelta (valores de 0.1ml fueron obtenidos con otros prototipos más precisos), lo que permitía dosificar cantidades de, por ejemplo, 4ml por día con absoluta precisión.
Tabla 1: En esta tabla se ejemplifican la cantidad de vueltas diarias que puede esperarse para cada tipo de motor en la posición mínima y máxima de la resistencia de ajuste. Los valores reales pueden variar por la imprecisión de los componentes utilizados.
| Salida de U5 | Pulsos necesarios para completar una vuelta | |||||||
|---|---|---|---|---|---|---|---|---|
| 200 | 100 | 48 | 15 | 200 | 100 | 48 | 15 | |
| Mínimo | Máximo | |||||||
| 4 | 8.100,00 | 16.200,00 | 33.750,00 | 108.000,00 | 27.000,00 | 54.000,00 | 112.500,00 | 360.000,00 |
| 5 | 4.050,00 | 8.100,00 | 16.875,00 | 54.000,00 | 13.500,00 | 27.000,00 | 56.250,00 | 180.000,00 |
| 6 | 2.025,00 | 4.050,00 | 8.437,50 | 27.000,00 | 6.750,00 | 13.500,00 | 28.125,00 | 90.000,00 |
| 7 | 1.012,50 | 2.025,00 | 4.218,75 | 13.500,00 | 3.375,00 | 6.750,00 | 14.062,50 | 45.000,00 |
| 8 | 506,25 | 1.012,50 | 2.109,38 | 6.750,00 | 1.687,50 | 3.375,00 | 7.031,25 | 22.500,00 |
| 9 | 253,13 | 506,25 | 1.054,69 | 3.375,00 | 843,75 | 1.687,50 | 3.515,63 | 11.250,00 |
| 10 | 126,56 | 253,13 | 527,34 | 1.687,50 | 421,88 | 843,75 | 1.757,81 | 5.625,00 |
| 12 | 31,64 | 63,28 | 131,84 | 421,88 | 105,47 | 210,94 | 439,45 | 1.406,25 |
| 13 | 15,82 | 31,64 | 65,92 | 210,94 | 52,73 | 105,47 | 219,73 | 703,13 |
| 14 | 7,91 | 15,82 | 32,96 | 105,47 | 26,37 | 52,73 | 109,86 | 351,56 |
U4 tiene un valor máximo de alimentación (según el fabricante) de 35 volt. Este valor debe ser vigilado y comprobado para las distintas versiones que se adquieran de ese dispositivo. Hemos agregado en el circuito un diodo de protección contra inversiones de la alimentación. La mayoría de las versiones de U4 en el mercado soportarían esa inversión pero preferimos ser precavidos dado el costo de un diodo extra. Los capacitores de desacople situados antes y después de U4 pueden ser reemplazados por capacitores de 1µf (como alternativa de compromiso) cuando se usen fuentes de alimentación mal filtradas.
Como unidad de potencia (U3) utilizamos un empaque de 8 transistores especialmente diseñado para este tipo de tareas; el ULN 28XX. En caso de estar disponible el ULN2803 el voltaje de alimentación del circuito de control será de 5 volt, y en el caso de estar disponible el ULN2804 de 12 volt. Esto se logra seleccionando U4 de acuerdo al código conseguido de U3, LM7805 para el primer caso y LM7812 para el segundo.
En el ULN2803 y ULN2804 pueden administrar hasta motores de 50 volt y 1 ampere de corriente, aunque en la práctica los límites son bastante menores. Hay que tener en cuenta que los transistores internos soportan 500 mA, pero se utilizan dos en paralelo por cada bobinado del motor, por lo que se obtiene 1 ampere por bobinado. En las hojas de datos del fabricante se recomienda no superar los 400 mA por compuerta, por lo que en nuestro caso no excederemos los 700-800 mA por bobinado como valor máximo recomendado. Si bien normalmente U3 puede soportar la disipación necesaria para trabajar dentro de estos límites, se recomienda que al utilizar este circuito en el extremo indicado por el fabricante, se adose un pequeño disipador al circuito integrado.
Figura 1: Circuito teórico del controlador de motores paso a paso.
Hay un último punto a tratar que es la existencia y elección de DZ1. Algunos autores recomiendan utilizar con ese circuito integrado un diodo tener de protección que controle el común de los diodos de protección. En caso de utilizarlo debería ser de 12 volt por un ampere. Lo incluimos en el diseño del circuito por completitud, pero hemos probado la mitad de los prototipos con el y la otra mitad sin él y no hemos encontrado diferencias en el funcionamiento. En caso de no instalarlo, reemplazarlo por un puente soldado en su lugar.
Implementación práctica
Descarga de material anexo: Las plantillas necesarias para la construcción de este dispositivo pueden obtenerse del documento: circuitos teórico y circuitos impresos..
Figura 2: Ejemplo de la placa de circuito impreso propuesta en este artículo.
En la Figura 2 puede observarse una alternativa de diseño de circuito impreso para este artículo. Se optimizo el montado de componentes para que se utilice una placa virgen simple faz para facilitar la elaboración del mismo. El montaje puntual dependerá de cada aplicación específica, pero para simplificar se puede unificar en la mayoría de los casos la alimentación del motor con la de la placa. Hay que observar que ese valor no supere el voltaje de alimentación máximo de U4.
Se recomienda utilizar zócalos de buena calidad para la conexión de los circuitos integrados. Algunos prototipos no los utilizaron y en ninguno ellos se necesito cambiar ningún circuito, por lo que podría obviarse la utilización de los zócalos si el aficionado lo cree conveniente. Nosotros en particular encontramos que su utilización no es onerosa y brinda comodidad para solucionar algunos problemas futuros.
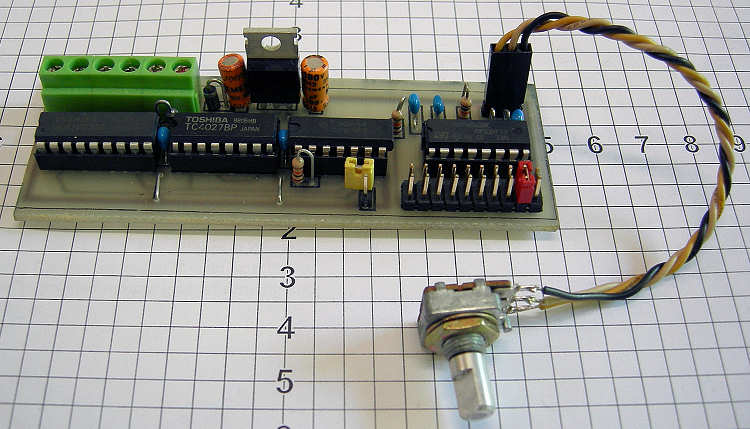
Figura 3: Vista general del circuito armado propuesto en este artículo.
Las opciones de conexionado del cableado a la placa dependerán del gusto de cada aficionado, pero en la Figura 3 puede observarse que se optó por utilizar borneras para la conexión al motor y la alimentación, y un conector normalizado para la resistencia variable de ajuste de velocidad.
Como siempre deberá revisarse que las soldaduras estén correctas y no se observen anormalidades en el conexionado de los componentes. Una cuidadosa inspección preliminar evita daños innecesarios en componentes electrónicos mal soldados.
Para fijar la placa a la caja seleccionada deberá observarse cual es el método más adecuado. En los casos que fuese necesario atornillar la placa a la caja, puede optarse por cortar el circuito impreso ligeramente más grande y realizar los orificios donde fuesen convenientes.
Conexionado del motor
Este es el punto más complicado ya que si no se dispone de la hoja de datos del motor, se debe encontrar el orden de los bobinados. Existe un estándar de colores de cables en algunos motores, pero su uso no es obligatorio. Se utiliza rojo para los puntos medios y luego negro y marrón para el primer bobinado y naranja y amarillo para el segundo. Este dato puede tomarse en forma indicativa pero no válida en todos los casos. Ante la duda verifique con un multímetro el motor a utilizar.
Si no se poseen las hojas de datos del motor, lo primero a encontrar es el punto medio de cada bobinado. Si se dispone de un motor de 5 cables, uno solo es común a los dos bobinados, pero si se dispone de 6 cables existe un común para cada uno. La manera más rápida de encontrarlos es utilizando un multímetro y midiendo las resistencias relativas entre los cableados. Aquellos que tengan entre si, la resistencia nominal del motor (que es la menor que se mida en las posibles combinaciones), serán las conexiones del común a uno de los bobinados secundarios.
Para instalar el motor es necesario conectar los puntos medios (o unión de ellos) a la alimentación positiva del motor (que puede o no ser la de la placa controladora dependiendo del valor de la misma) y finalmente se conectan a la bornera en orden los dos cables del primer bobinado (1a y 1b) y luego los dos cables del segundo bobinado (2a,2b). Alterar el orden de los bobinados entre si, no acarrea mayor inconveniente que la alteración del sentido de giro que de todas maneras puede ser controlado con J1. Si se notase algún problema con el giro, revisar el conexionado general de la placa.
Existe un método es más simple que la medición de los bobinados y es una alternativa citada en las referencias (Laidman R., 2000) . Conectar correctamente los puntos medios y luego conectar los otros cables de cualquier forma. Si el giro no es armonioso y continuo, se alternan de posición los cables de un extremo, y si sigue sin ser armonioso se alternan los dos centrales y seguro el giro es correcto luego de esta operación. De la misma manera que en el caso anterior, el sentido de giro se ajusta con J1.
En algunos motores, se recomienda para reducir la disipación térmica del mismo, colocar una resistencia en serie con los puntos medios de los bobinados. Esta resistencia debe tener la potencia suficiente para disipar la corriente consumida por el motor en funcionamiento. Se debe consultar al fabricante del motor si fuese posible, o a alguien especializado para determinar si esta resistencia es necesaria.
Listado de materiales
El siguiente listado contiene todos los materiales necesarios para construir la placa controladora. Los precios fueron ajustados a un solo proveedor y pueden ser más económicos, sobre todo si se compra en cantidad.
Tabla 2: Listado de materiales electrónicos para construcción del circuito.
| Ítem | Cantidad | Costo Unitario | Costo Total | Observaciones |
|---|---|---|---|---|
| CD4060 | 1 | 1.2000 | 1.2000 | |
| CD4070 | 1 | 1.2000 | 1.2000 | |
| CD4027 | 1 | 1.2000 | 1.2000 | |
| ULN2803/ULN2804 | 1 | 1.8000 | 1.8000 | Uno de los dos, dependiendo cuál se consiga |
| LM7805/LM7812 | 1 | 0.9000 | 0.9000 | Si se consigue ULN2803 usar LM7805. |
| Diodo Zener | 1 | 0.2000 | 0.2000 | Por ejemplo 12volt 1Watt 1N4742 |
| Diodo 1N4004 | 1 | 0.1000 | 0.1000 | Puede ser 1N4001-4007 elegir por costo |
| Resistencia 4K7Ω | 1 | 0.0250 | 0.0250 | |
| Resistencia 10KΩ | 3 | 0.0250 | 0.0750 | |
| Resistencia 27KΩ | 1 | 0.0250 | 0.0250 | |
| Resistencia variable 10KΩ | 1 | 0.8000 | 0.8000 | Se recomienda potenciómetro lineal. |
| Capacitor 100nf multicapa | 6 | 0.1000 | 0.6000 | En caso de poseer una fuente de alimentación mal filtrada, puede usarse un capacitor de 1µf como alternativa de compromiso. |
| Capacitor 300nf multicapa | 1 | 0.1000 | 0.1000 | Suele encontrarse más fácilmente el de 330nF. En caso de poseer una fuente de alimentación mal filtrada, puede usarse un capacitor de 1µf como alternativa de compromiso. |
| Bornera paso 0.3" 6 contactos | 1 | 0.9000 | 0.9000 | Buscar alternativas económicas, ya que existe mucha variación de costos |
| Conector J1 (paso 0.2" 2 terminales) | 1 | 0.0300 | 0.0300 | |
| Conector J2 (paso 0.2" 20 terminales) | 1 | 0.2500 | 0.2500 | |
| Conector para potenciómetro | 1 | 0.2500 | 0.2500 | |
| Conector hembra para J1 | 1 | 0.1500 | 0.1500 | |
| Zocalo 18 patas | 1 | 0.1500 | 0.1500 | |
| Zocalo 16 patas | 2 | 0.1400 | 0.2800 | |
| Zocalo 14 patas | 1 | 0.1300 | 0.1300 | |
| Placa circuito impreso 3cmx10cm (Epoxi Simple Faz) | 1 | 1.1000 | 1.1000 | Costo tomado sobre una placa de 10x10 cm haciendo tres circuitos, confección casera. |
| 11.4650 |
Bibliografía
- Art's Theremin Page: Unipolar Stepper Motor Control Circuit [Para más información....]
- Groel N. - Los motores paso a paso [Para más información....]
- Hoja de datos del 78XX Regulador de voltaje positivo de 1Ampere y 3 Terminales (fabricantes varios)
- Hoja de datos del CD4027 Doble flip-flop J-K ordenador/seguidor con reset y set (fabricantes varios)
- Hoja de datos del CD4060 Contador binario de 14 etapas Ripple-Carry y oscilador (fabricantes varios)
- Hoja de datos del CD4070 Cuádruple compuerta OR exclusiva de doble entrada (fabricantes varios)
- Hoja de datos del ULN28XXA Matriz de ocho transistores darlington (fabricantes varios)
- Jones Douglas - Basic Stepping Motor Control Circuits - The University of Iowa - Department of Computer Science [Para más información....]
- Kari Salmi - An easy-to-use stepper motor controller/driver [Para más información....]
- Laidman R. - Tutorial Part I - Unipolar Stepper Motors - www.stepperworld.com [Para más información....]
- Sax, H - Stepper motor driving - SGS-THOMSON Microelectronics - 1995 Aplication Note
- Solarbotics.net - Industrial Circuits Application Note - Drive circuit basics [Para más información....]
- Solarbotics.net - Stepper Motor Basics [Para más información....]
Glosario
- Multímetro: Es un instrumento que permite la medición de varias magnitudes eléctricas en una misma unidad. Habitualmente permiten medir resistencia, voltage y corriente. También son llamados vulgarmente polímetros o tester, dependiendo el modismo del país.